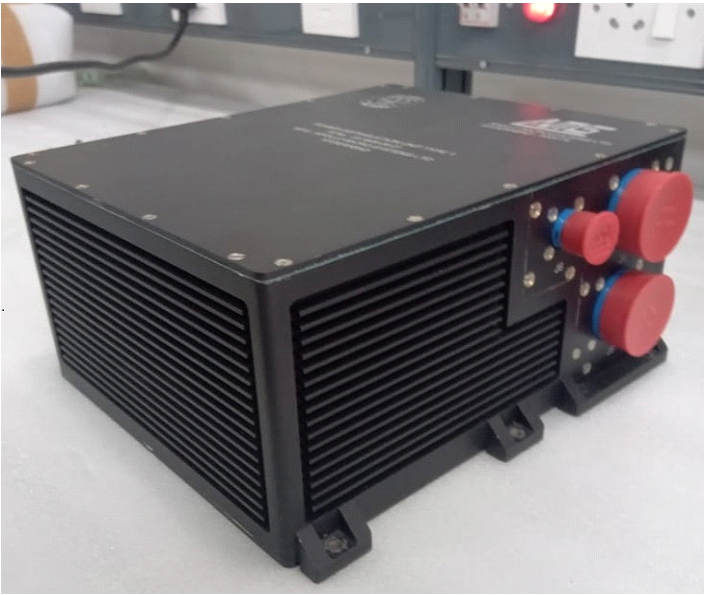
The KUSHA system is an indigenous rotary servo actuation system designed to provide precise aerodynamic control for advanced underwater/aerospace vehicles. The system consists of four rotary actuators arranged orthogonally (90° apart) and a quad-channel digital controller. Through a gear-train mechanism, rotary motion of the actuators is converted into accurate fin deflections, enabling the generation of control forces and moments required for vehicle maneuvering and stability.
Read Less...
Key Features :
Electro-Mechanical Actuators :
- Four independently controlled rotary actuators, positioned at 90°.
- Converts rotary actuator motion into angular fin deflection for aerodynamic control.
- Low noise anti aliasing filter.
Software & Control :
- Embedded DSP algorithms for adaptive PID-based control.
- Supports re-programmability of algorithms and limits.
- Custom GUI software for configuration, monitoring, and diagnostics.
System Specifications:
- Max Linear Command Range: ±28 mm.
- Mechanical Angular Limit: ±120 Nm.
- Max Force per Fin (at 110 mm): 9600 N.
- Max Angular Speed of Fin:
- 4000 °/sec @ No Load.
- 200 °/sec @ 100 Nm Load.
- Bandwidth: 25 Hz (20 A, -90°).
- Weight (w/o fins): < 10 kg.
- Total Backlash (Motor–Fin shaft): ≤ 0.6° (±0.3°).
- Max Overshoot: ≤ 20%.
- Moment of Inertia of Fin: < 0.6 × 10&supmin;3 kg·m².
- Actuator Load (Till Boost Phase): ~500 sec duration (simulation study ongoing).